This page is part of an archival collection and is no longer actively maintained.
It may contain outdated information and may not meet current or future
WCAG accessibility standards.
We provide this content, its subpages, and associated links for historical reference only.
If you need assistance, please contact support@cs.washington.edu
Battery-free wireless microrobots
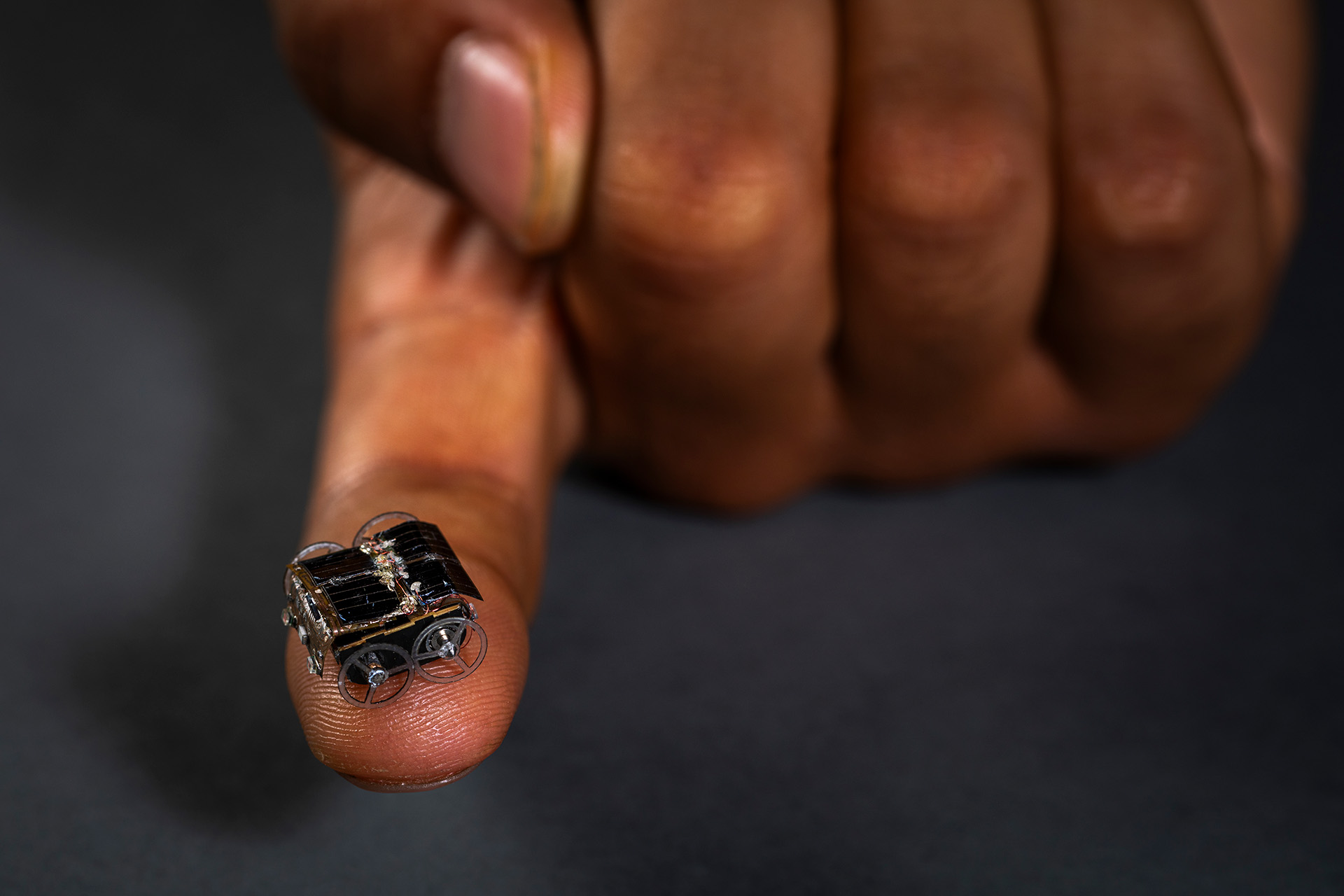
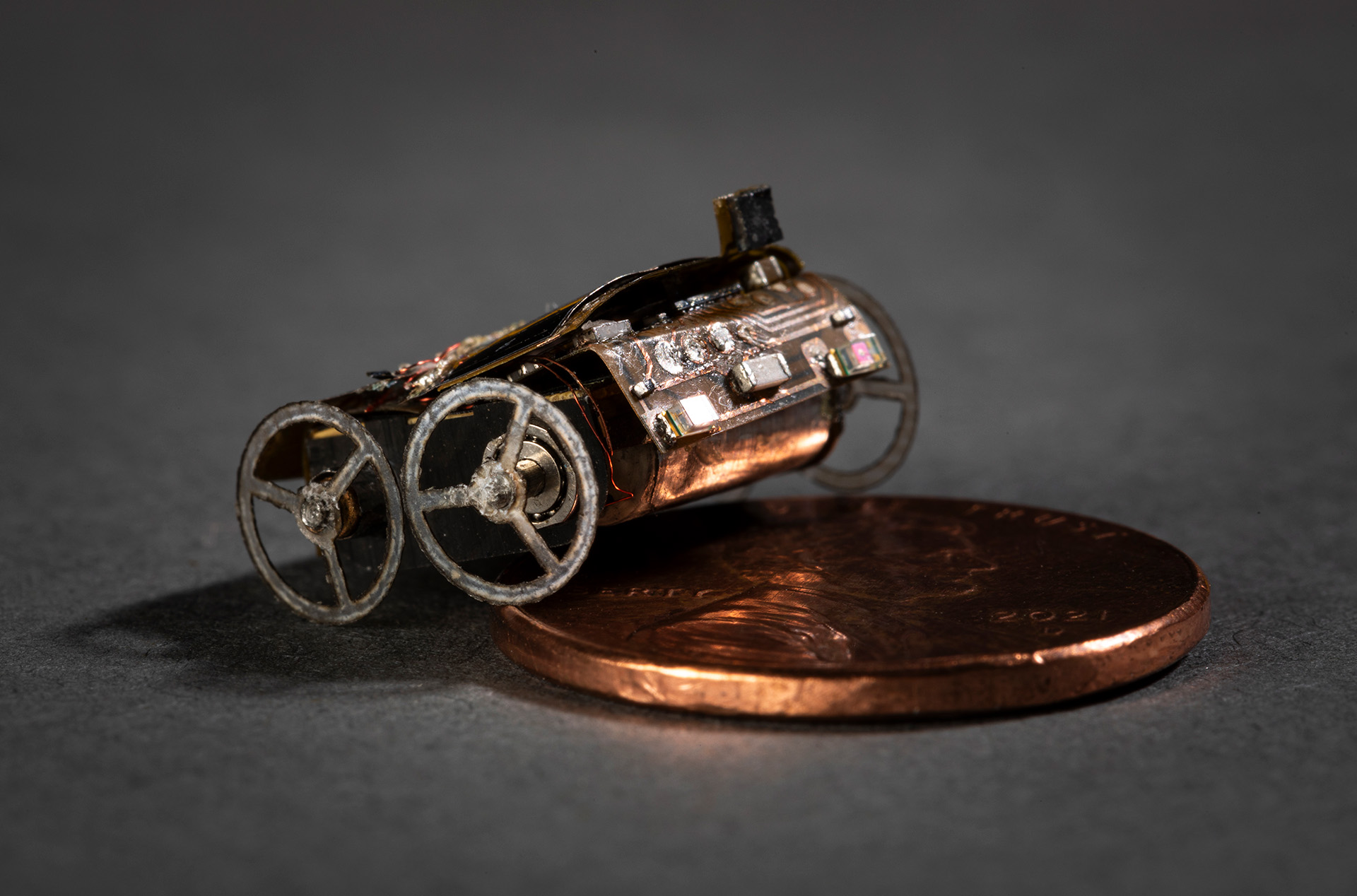
MilliMobile: An Autonomous Battery-free Wireless Microrobot
We present MilliMobile: a first of its kind battery-free autonomous robot capable of operating on harvested solarand RF power. We challenge the conventional assumption that motion and actuation are beyond the capabilities of battery-free devices and demonstrate completely untethered autonomous operation in realistic indoor and outdoor lighting as well as RF power delivery scenarios. We show first that through miniaturizing a robot to gram scale, we can significantly reduce the energy required to move it. Second, we develop methods to produce intermittent motion by discharging a small capacitor (47-150 µF) to move a motor in discrete steps, enabling motion from as little as 50 µW of power or less. We further develop software defined techniques for maximizing power harvesting. MilliMobile operates in the optimal part of the charging curve by varying the charging time to achieve maximum speeds of up to 5.5 mm/s. The MilliMobile prototype has a 10x10 mm chassis and weighs less than 1.1 g. Our robot can carry payloads 3 times its own weight, and only experiences a 25% reduction in speed when carrying a 1 g payload. We demonstrate operation on 10 different surfaces ranging from wood and concrete to compact soil. We further show the ability to cold-start and move in light conditions as low as 20 W/m2 and -10 dBm of RF power. In addition to operating on harvested power, our robot demonstrates sensor and control autonomy by seeking light using onboard photodiodes, and can transmit sensor data wirelessly to a base station over 200 m away.
Publications
MilliMobile: An Autonomous Battery-free Wireless Microrobot [paper]